底盘运动学
时间:2020-05-27 17:15:07
收藏:0
阅读:116
参考 https://blog.csdn.net/qq_24706659/article/details/88342626
四轮阿克曼底盘(Four-wheeled Ackerman robot)
像汽车一样,前轮转向,后轮驱动的模型就叫阿克曼模型
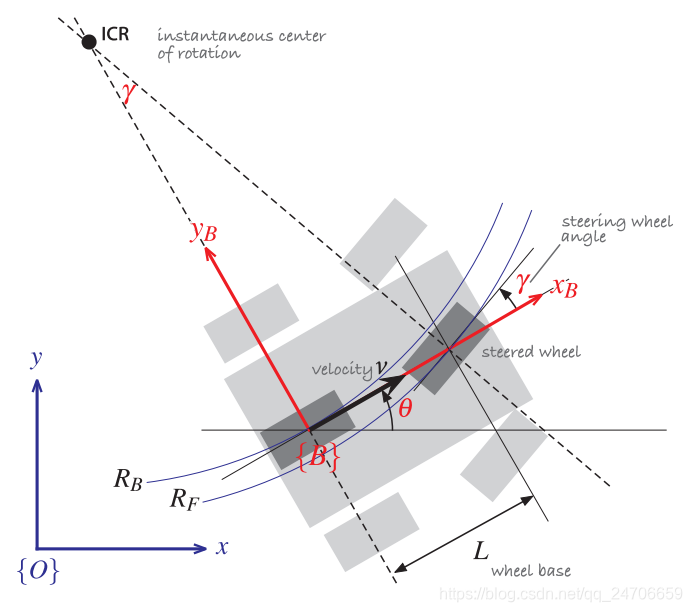
已知车体线速度 v 和角度 w,L 表示车体驱动轮中心与车体转动轮中心的间距,同时设定车体两个驱动轮间距为 d, 求解车体左轮速度 vl、右轮速度 vr 和前轮的角度 γ
旋转半径RB = v/w ,同时旋转半径RB = L/tan(γ),所以γ = arctan(w×L/v)
如果逆时针旋转(左转)
左轮速度 vl = w ×(RB - d/2)
右轮速度 vr = w ×(RB + d/2)
否则顺时针旋转(右转)
左轮速度 vl = w ×(RB + d/2)
右轮速度 vr = w ×(RB - d/2)
若已知轮线速度 v0,轮半径 r 和减速机减速比 i ,可以求出电机输出轴转速 = ( v0 / r ) × i × 60 / (2π) ,单位rpm
评论(0)