Invalid
时间:2020-04-16 18:08:29
收藏:0
阅读:103
问题
root@cc701cdd4bef:~/ankobot_catkin_ws# roslaunch turtlebot3_gazebo turtlebot3_house.launch
... logging to /root/.ros/log/1454582a-7ee6-11ea-aae8-0242ac110003/roslaunch-cc701cdd4bef-12661.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
No such file or directory: /root/ankobot_catkin_ws/src/turtlebot3/turtlebot3_description/urdf/turtlebot3_.urdf.xacro None None
Invalid <param> tag: Cannot load command parameter [robot_description]: command [/opt/ros/kinetic/lib/xacro/xacro --inorder /root/ankobot_catkin_ws/src/turtlebot3/turtlebot3_description/urdf/turtlebot3_.urdf.xacro] returned with code [2].
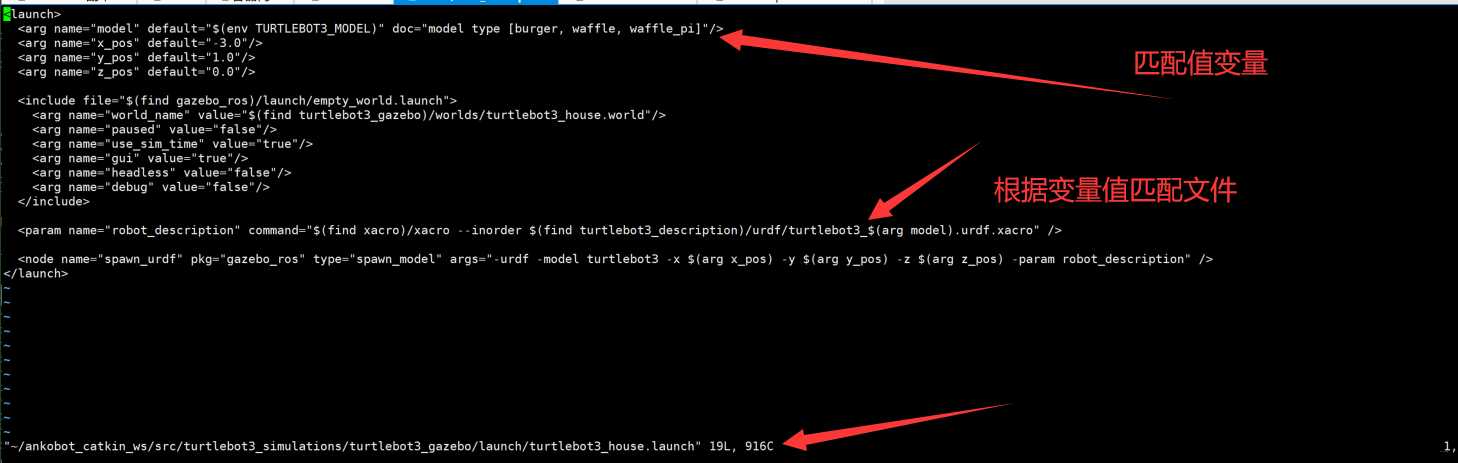
Param xml is <param command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" name="robot_description"/>
The traceback for the exception was written to the log file原因
Invalid <param> tag: Cannot load command parameter [robot_description]:...
再看 /root/.ros/log/1454582a-7ee6-11ea-aae8-0242ac110003/roslaunch-cc701cdd4bef-12661.log 文件
[roslaunch.config][INFO] 2020-04-16 07:16:01,925: loading config file /root/ankobot_catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/launch/turtlebot3_house.launch
[roslaunch][INFO] 2020-04-16 07:16:02,099: Added node of type [gazebo_ros/gzserver] in namespace [/]
[roslaunch][INFO] 2020-04-16 07:16:02,100: Added node of type [gazebo_ros/gzclient] in namespace [/]
[roslaunch][ERROR] 2020-04-16 07:16:02,679: Invalid <param> tag: Cannot load command parameter [robot_description]: command [/opt/ros/kinetic/lib/xacro/xacro --inorder /root/ankobot_catkin_ws/src/turtlebot3/turtlebot3_description/urdf/turtlebot3_.urdf.xacro] returned with code [2].
Param xml is <param command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" name="robot_description"/>
[roslaunch][ERROR] 2020-04-16 07:16:02,682: The traceback for the exception was written to the log file
[roslaunch][ERROR] 2020-04-16 07:16:02,683: Traceback (most recent call last):
File "/opt/ros/kinetic/lib/python2.7/dist-packages/roslaunch/__init__.py", line 306, in main
p.start()
File "/opt/ros/kinetic/lib/python2.7/dist-packages/roslaunch/parent.py", line 268, in start
self._start_infrastructure()
File "/opt/ros/kinetic/lib/python2.7/dist-packages/roslaunch/parent.py", line 217, in _start_infrastructure
self._load_config()
File "/opt/ros/kinetic/lib/python2.7/dist-packages/roslaunch/parent.py", line 132, in _load_config
roslaunch_strs=self.roslaunch_strs, verbose=self.verbose)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/roslaunch/config.py", line 453, in load_config_default
raise RLException(e)
RLException: Invalid <param> tag: Cannot load command parameter [robot_description]: command [/opt/ros/kinetic/lib/xacro/xacro --inorder /root/ankobot_catkin_ws/src/turtlebot3/turtlebot3_description/urdf/turtlebot3_.urdf.xacro] returned with code [2].
Param xml is <param command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" name="robot_description"/>
[rospy.core][INFO] 2020-04-16 07:16:02,684: signal_shutdown [atexit]原因就在这里
Invalid <param> tag: Cannot load command parameter [robot_description]: command [/opt/ros/kinetic/lib/xacro/xacro --inorder /root/ankobot_catkin_ws/src/turtlebot3/turtlebot3_description/urdf/turtlebot3_.urdf.xacro] returned with code [2].没有识别出来 TURTLEBOT3_MODEL 变量值
~/ankobot_catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/launch/turtlebot3_house.launch
解决
执行如下赋值命令:
export TURTLEBOT3_MODEL=waffle_pi提示
- 记得仔细看 log
- 记得仔细看 log
- 记得仔细看 log
- 不仔细看 log 的工程师不是一个好的文档工程师
参考:
Invalid <param> tag: Cannot load command parameter [robot_description]
评论(0)