目标检测方法——SSD
时间:2016-12-21 14:01:15
收藏:0
阅读:13749
SSD论文阅读(Wei Liu——【ECCV2016】SSD Single Shot MultiBox Detector)
目录
- 作者
- 文章的选择原因
- 方法概括
- 方法细节
- 相关背景补充
- 实验结果
- 与相关文章的对比
- 总结
作者
文章的选择原因
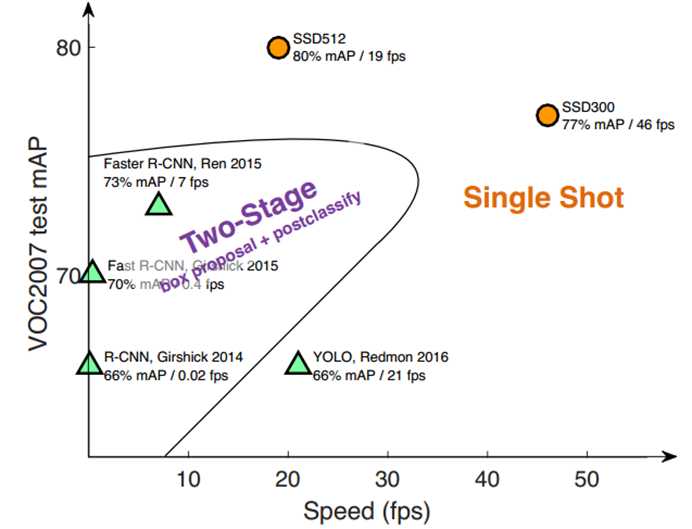
- 性能好,single stage
方法概括
-
文章的方法介绍
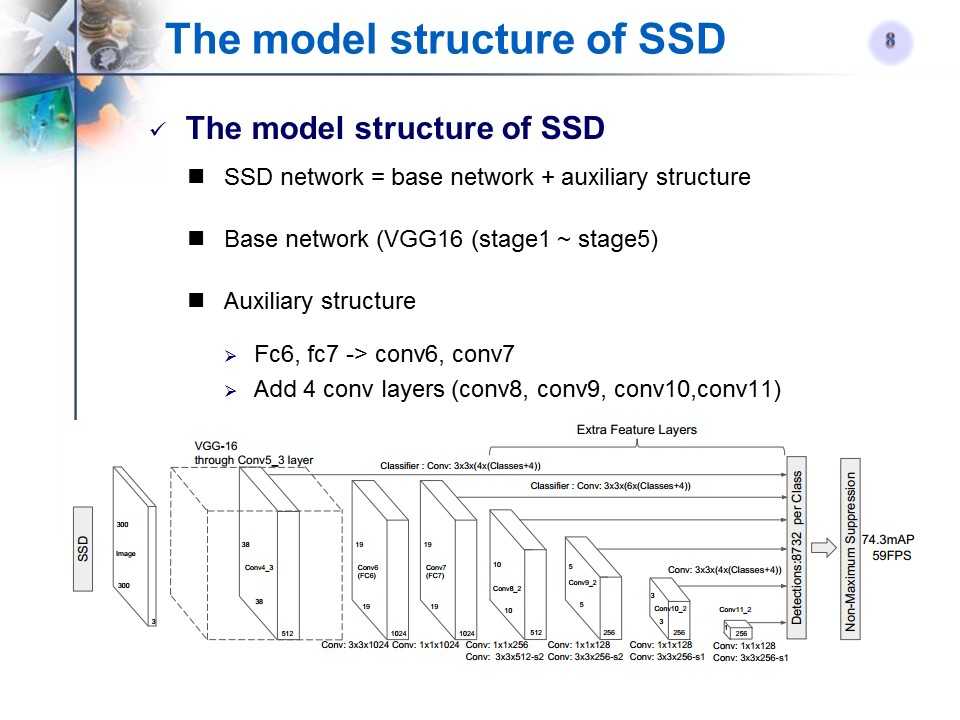
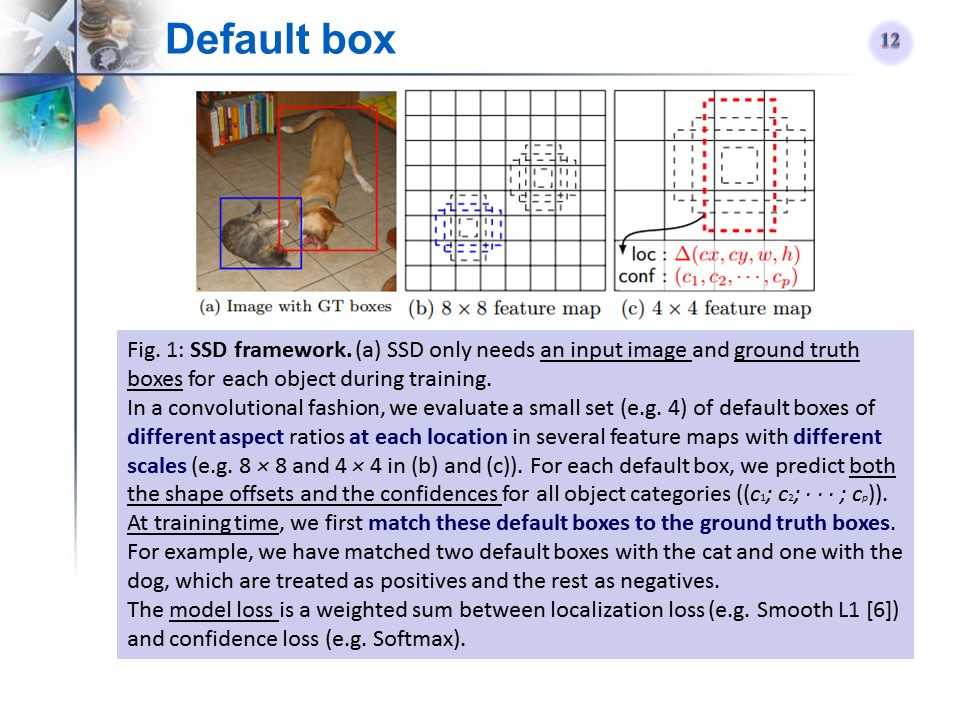
- SSD主要用来解决目标检测的问题(定位+分类),即输入一张待测图像,输出多个box的位置信息和类别信息
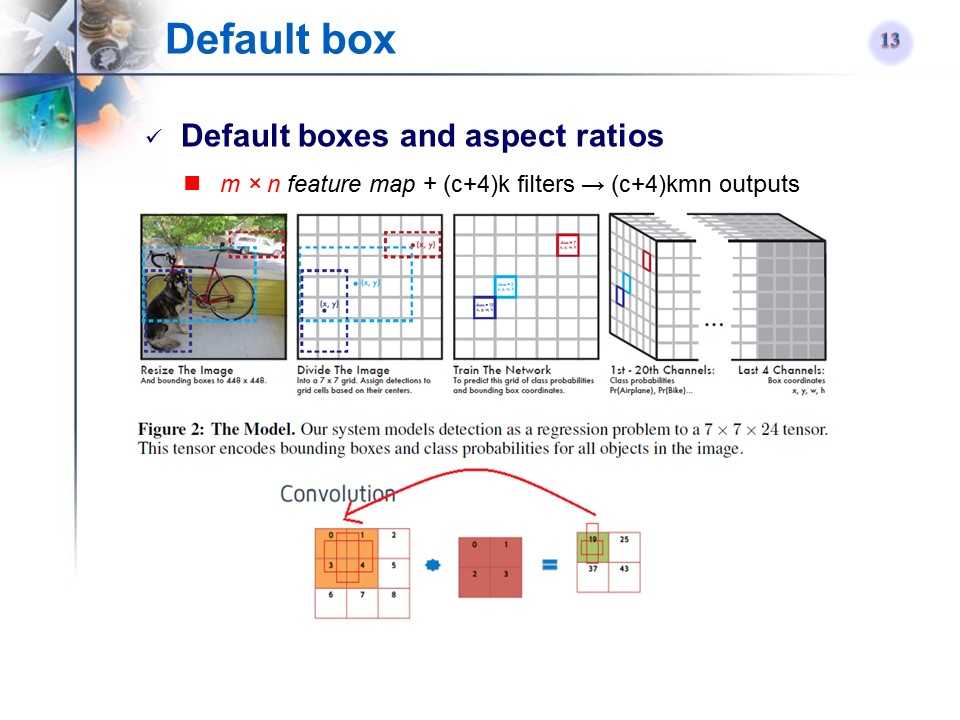
- 测试时,输入一张图像到SSD中,网络输出一个下图最右边的tensor(多维矩阵),对该矩阵进行非极大值抑制(NMS)就能得到每个目标的位置和label信息
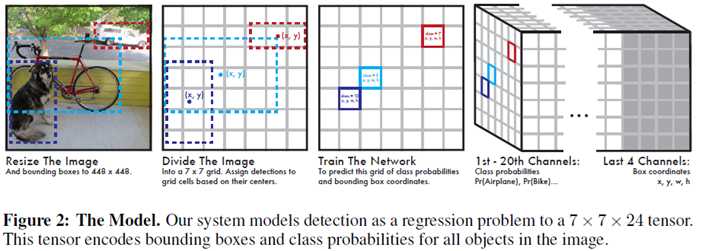
Figure2的最右图的1th-20th Channel表示类别,每一个Channel上的map对应原图,last 4 channel的每一个map分别对应x,y,w,h的偏移量。最后4个通道可以确定一个box的位置信息,前20个通道确定类别信息。
-
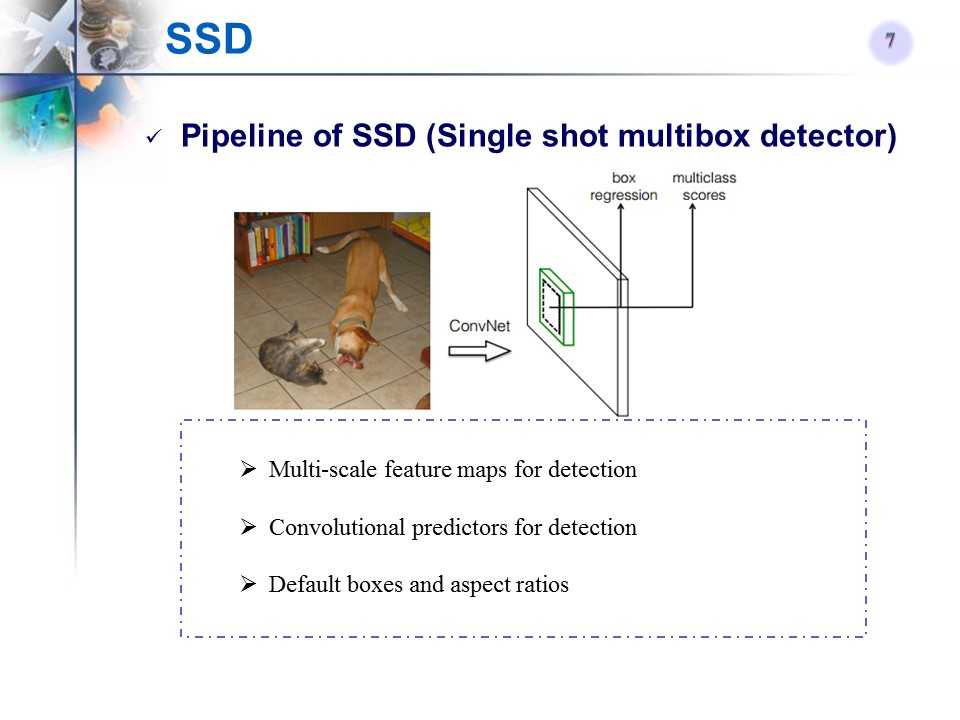
方法的pipeline和关键点
方法细节
-
模型结构
-
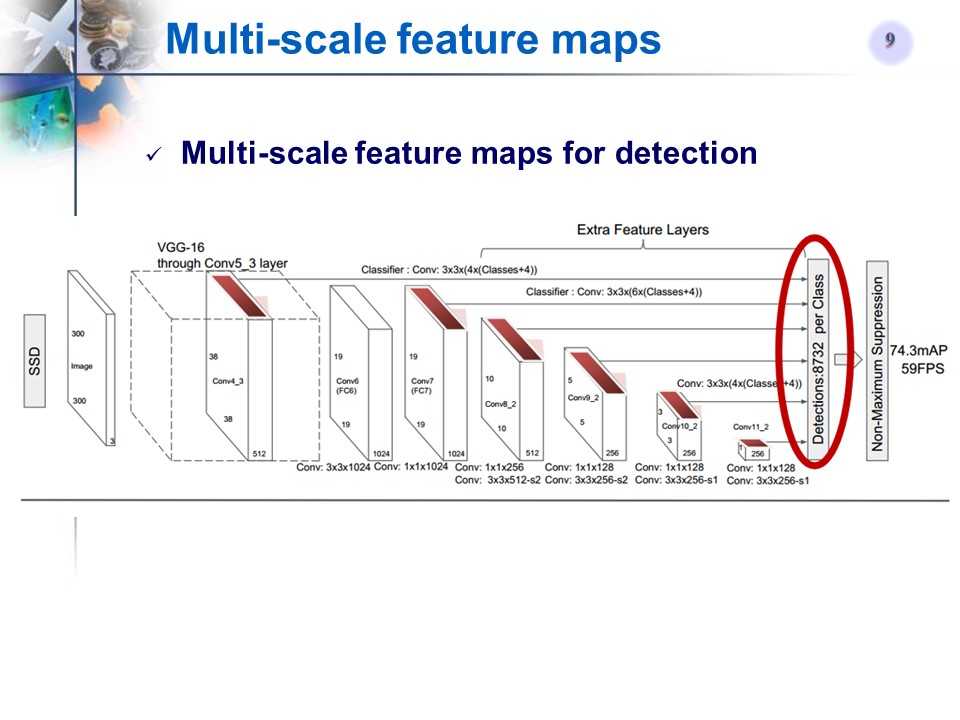
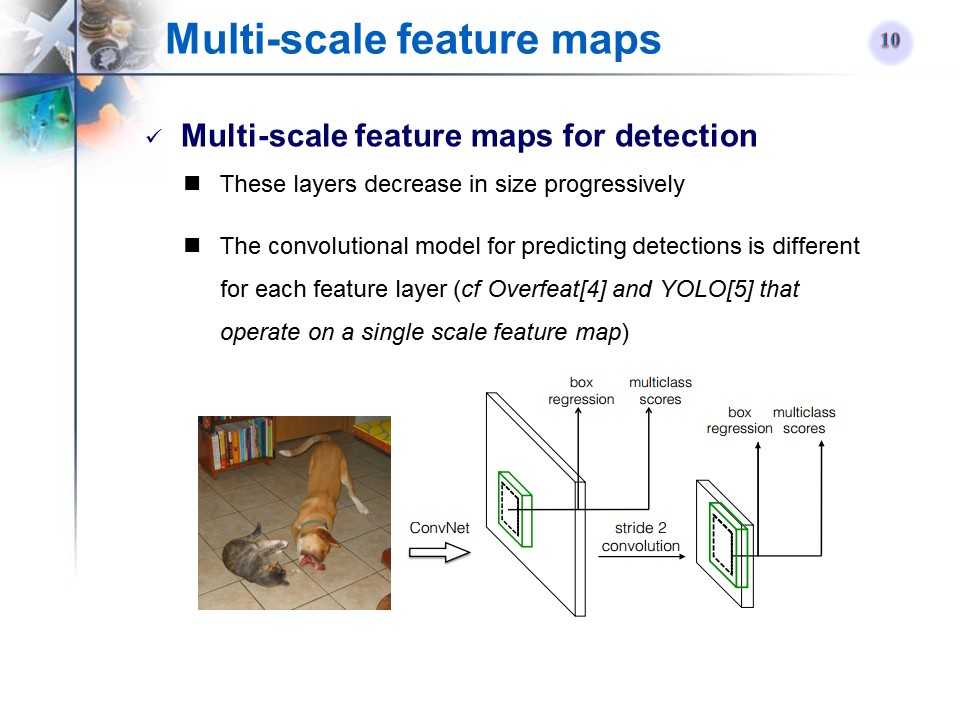
多尺度特征图
-
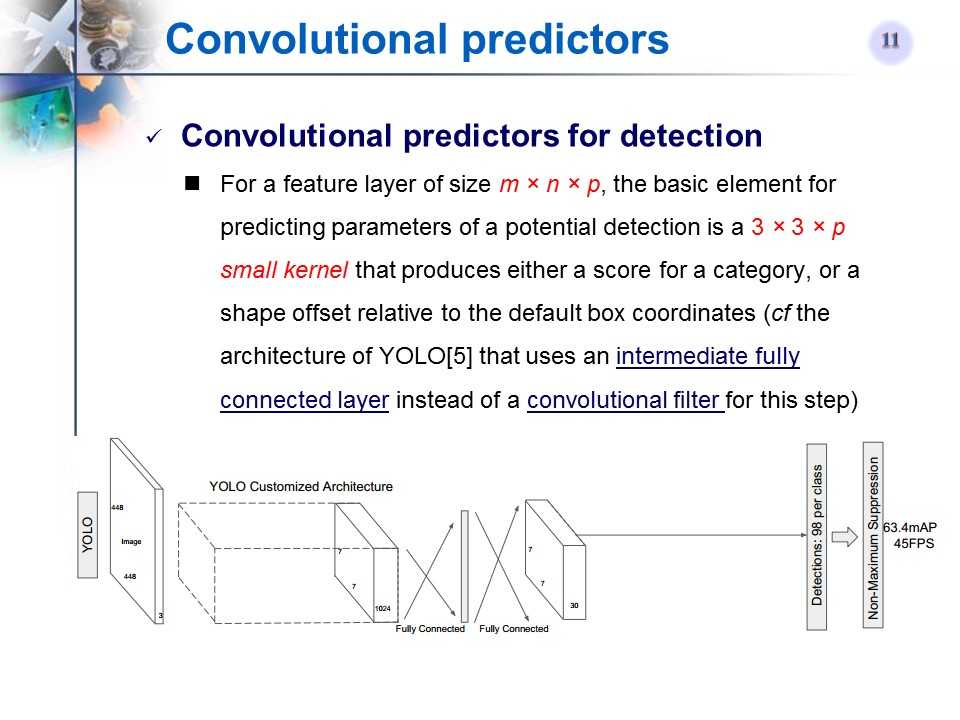
用来预测的卷积滤波器
-
defaul box
-
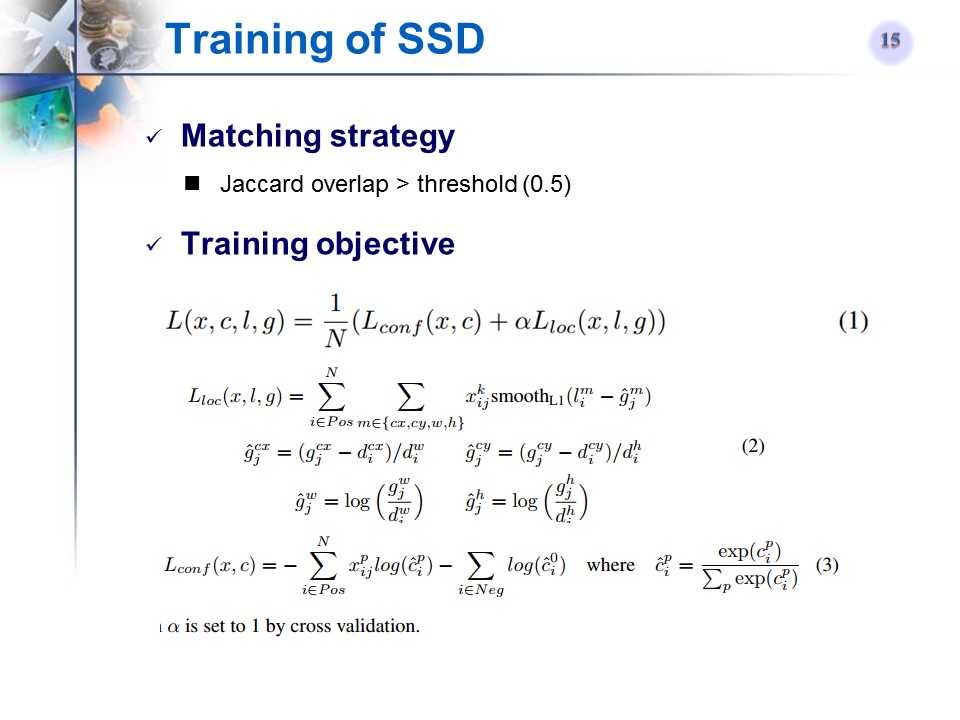
groundTruth的标定,损失函数
-
default box和尺度的选择
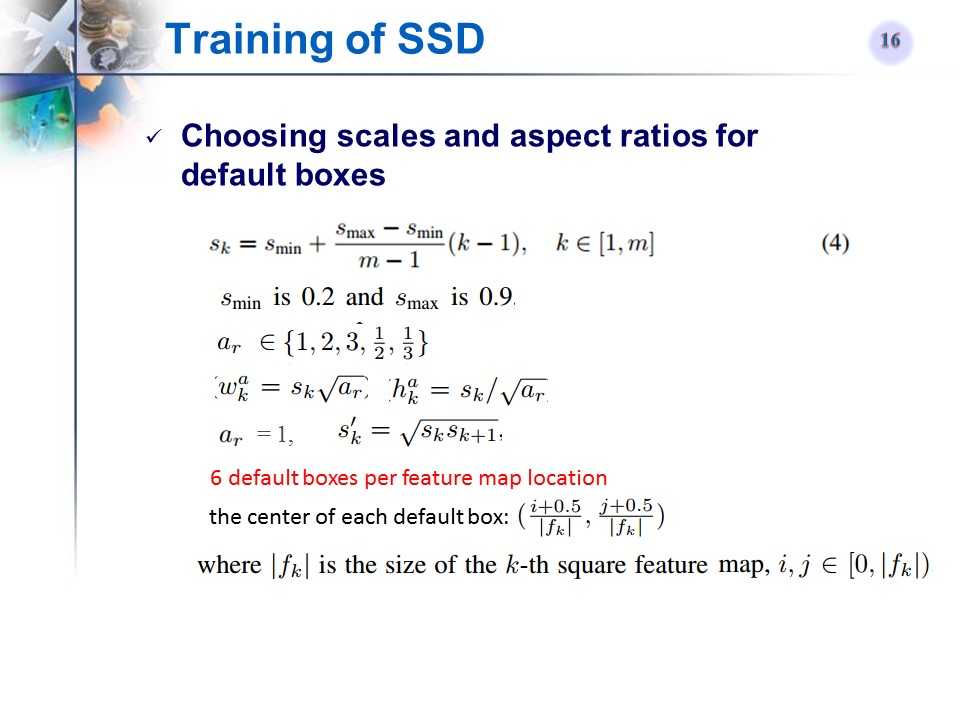
-
SSD的训练——Hard negative mining
-
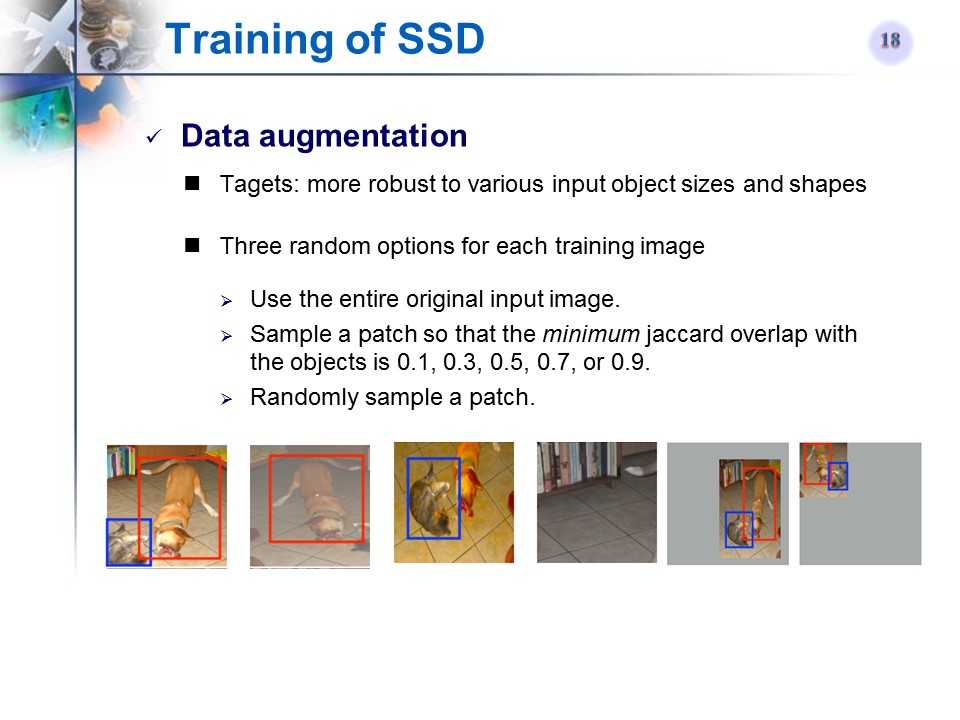
SSD的训练——数据扩增
相关背景补充
-
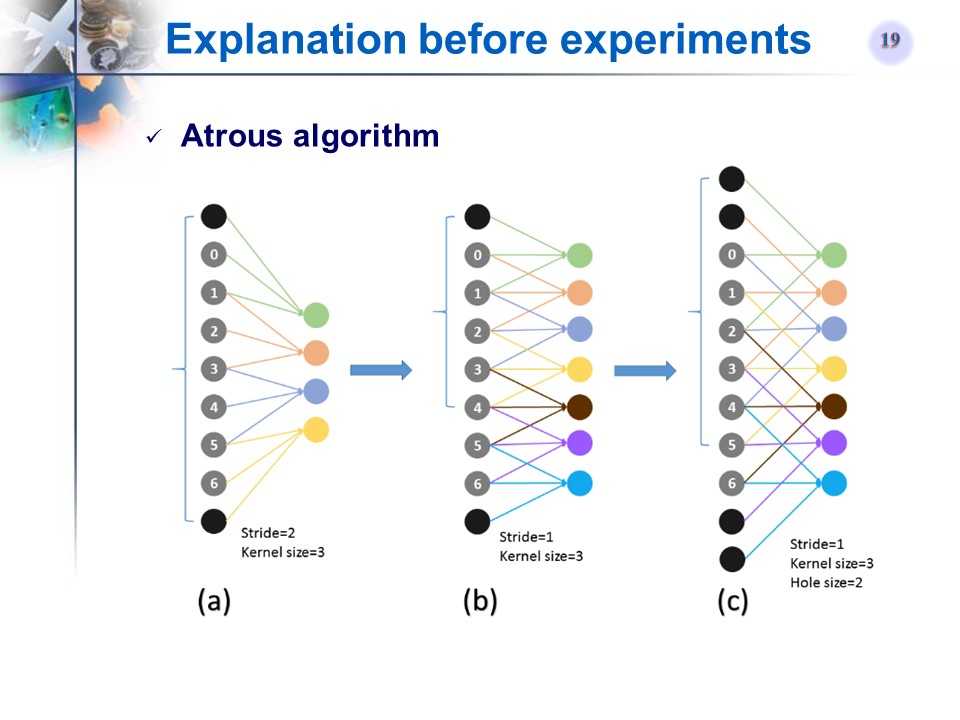
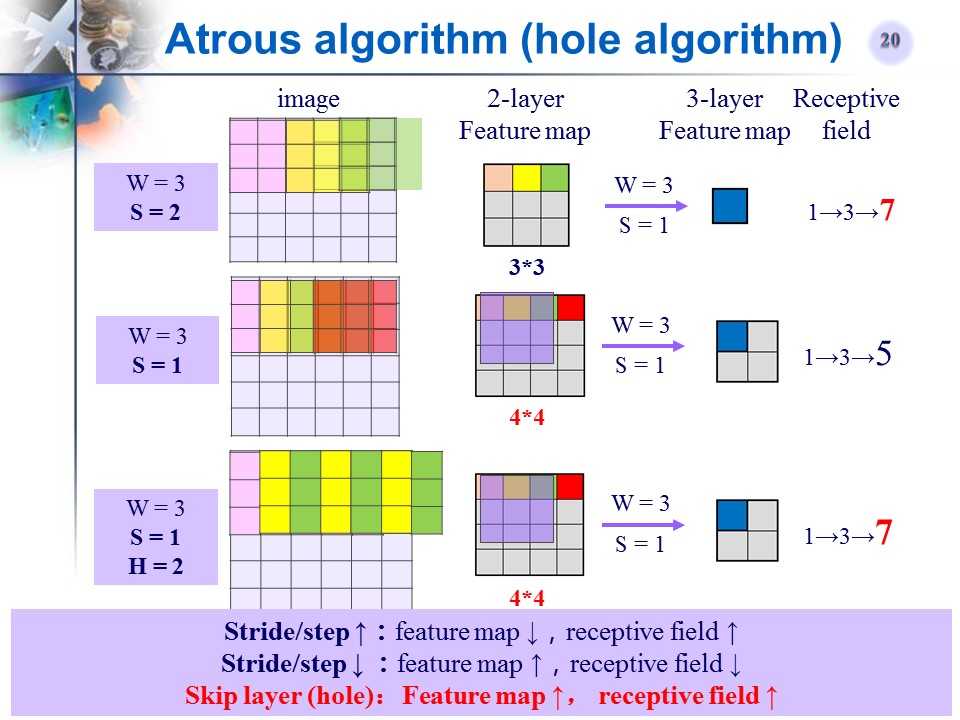
Atrous算法(hole算法)
-
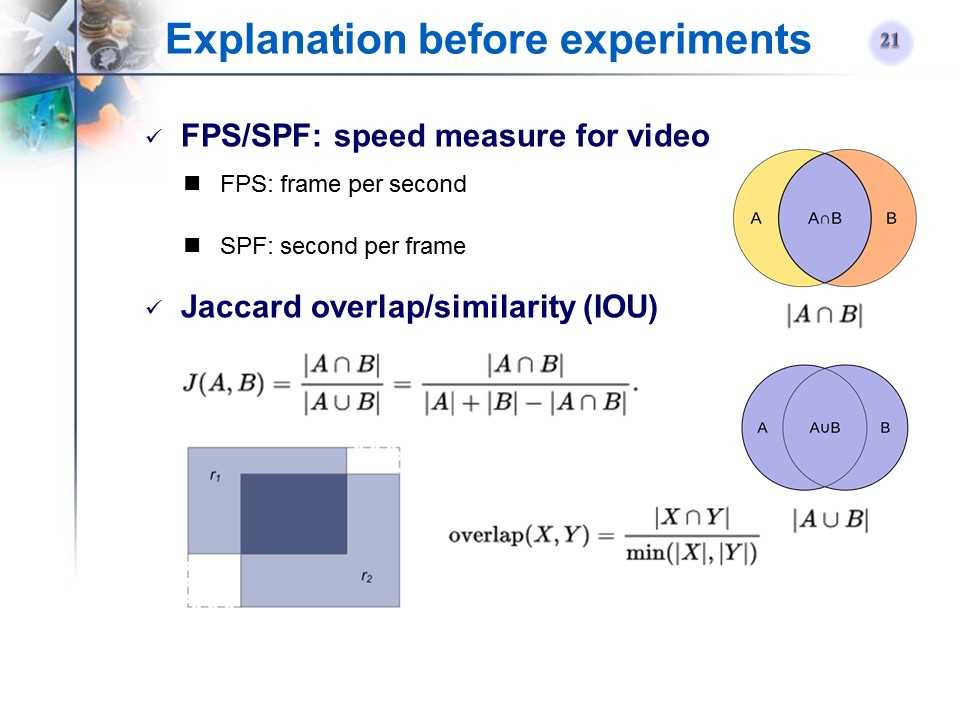
FPS/SPF, Jaccard overlap
-
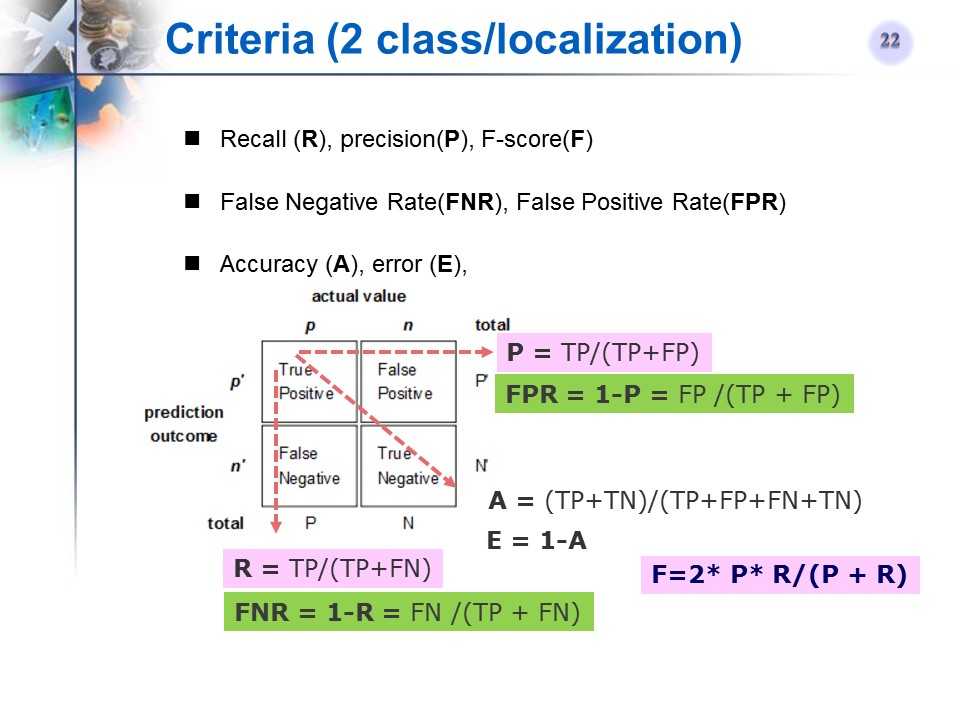
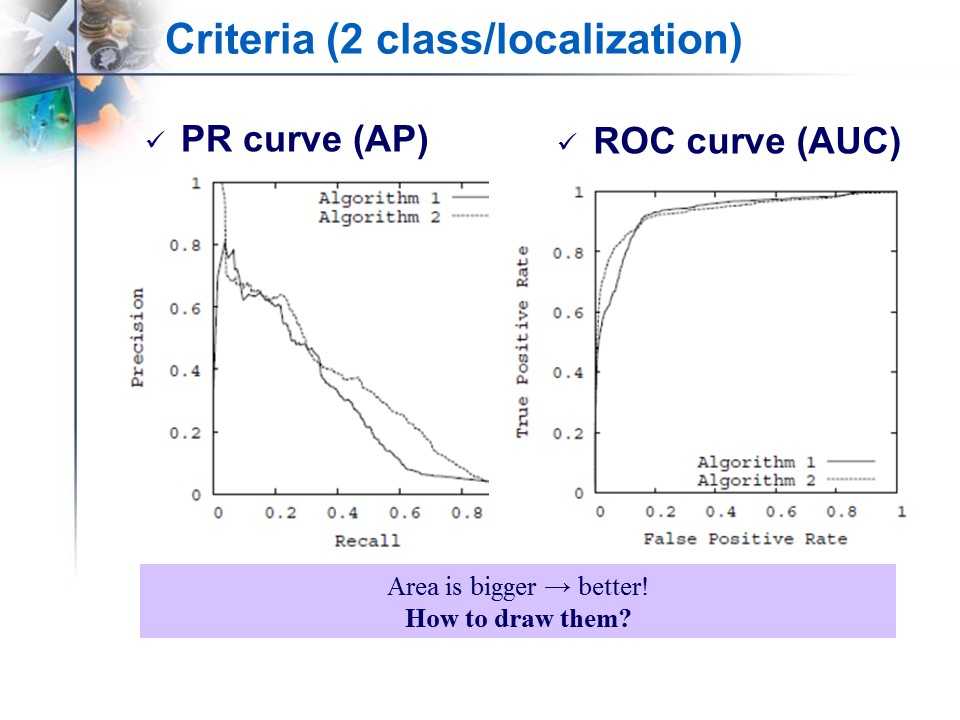
二类分类/检测常用的评价标准 (recall, precision, f-measure, accuracy, error, PR曲线和ROC曲线,AP,AUC)
-
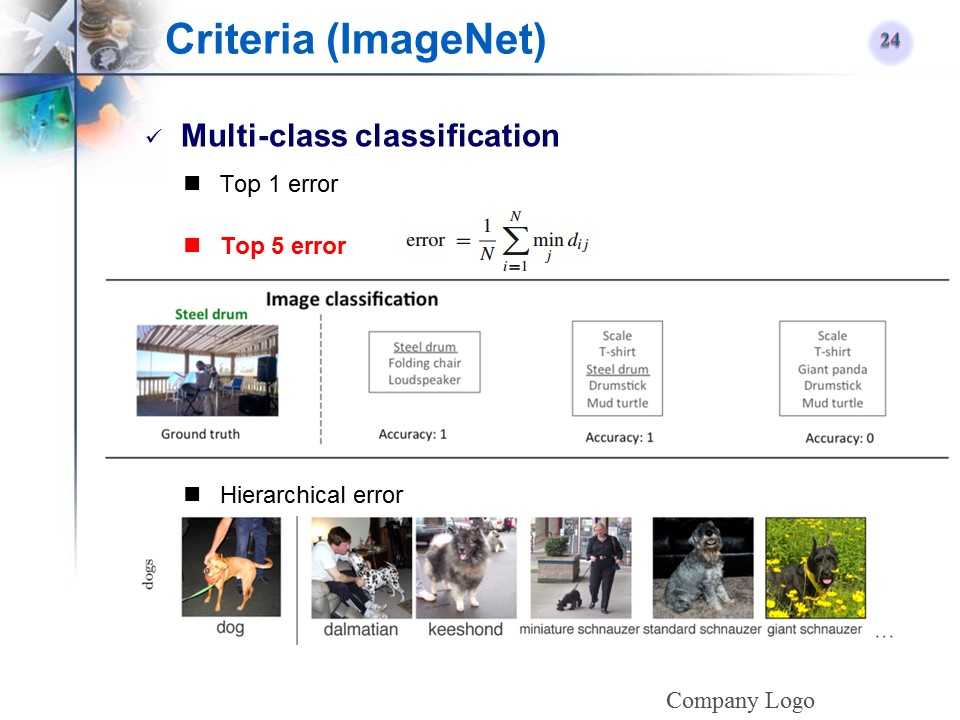
ImageNet多类分类的评价标准
-
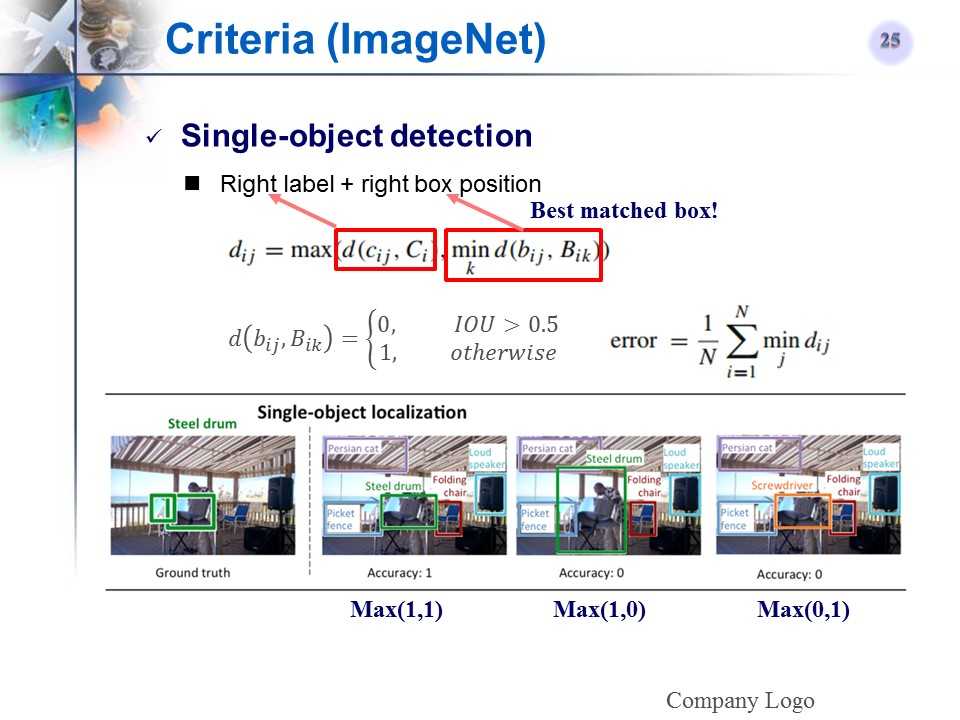
ImageNet单目标检测的评价标准
-
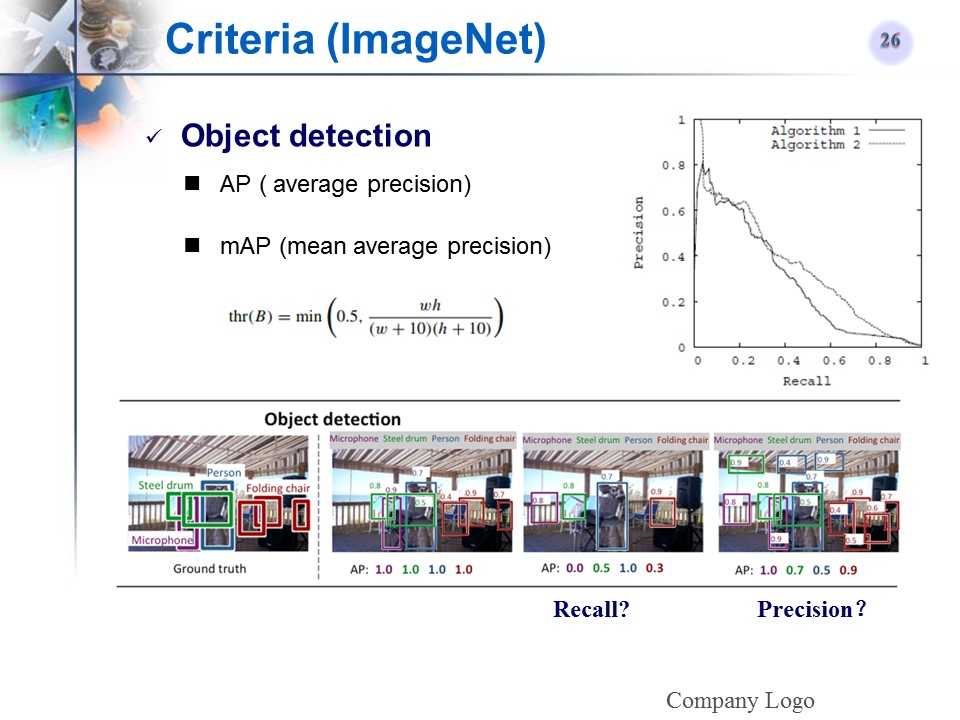
ImageNet(多)目标检测的评价标准
实验结果
-
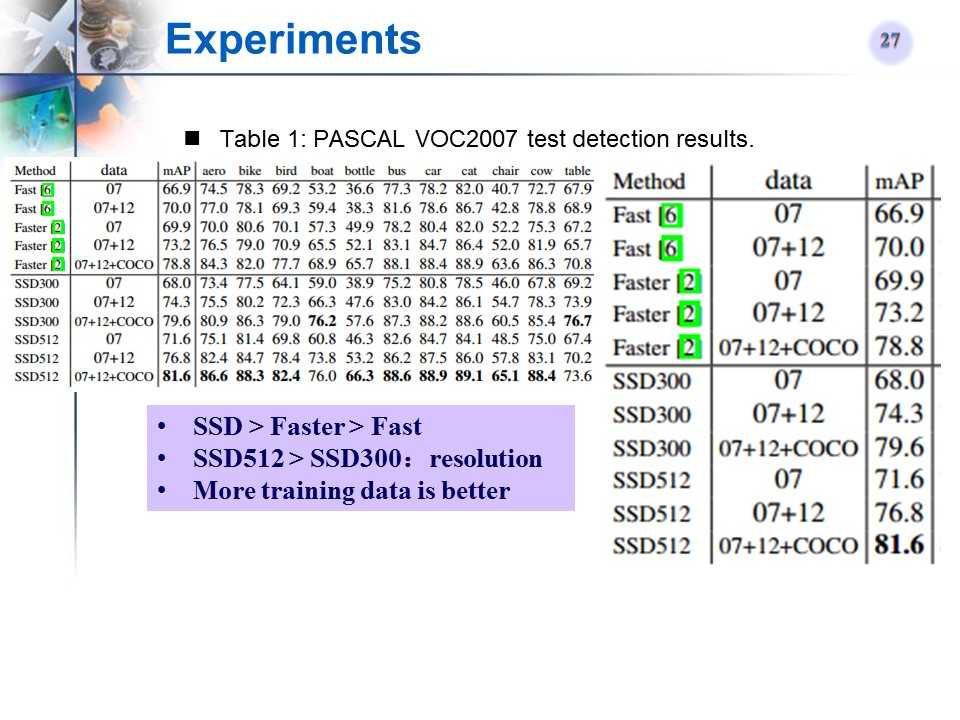
PASCAL VOC2007 test detection结果
-
使用数据扩增、多尺度default box、atrous算法的对比效果
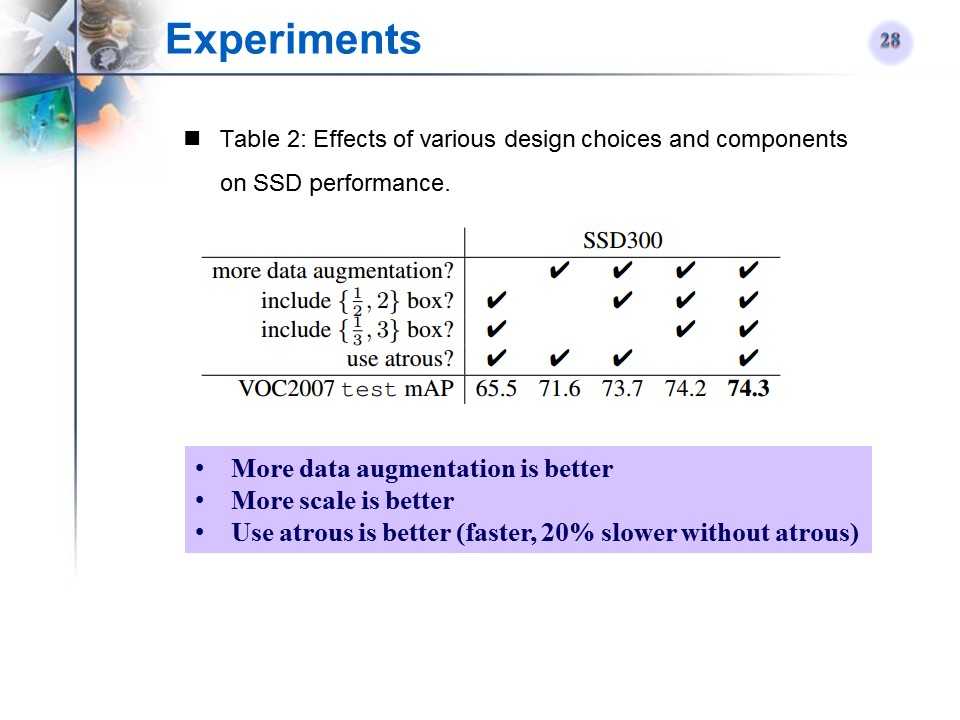
-
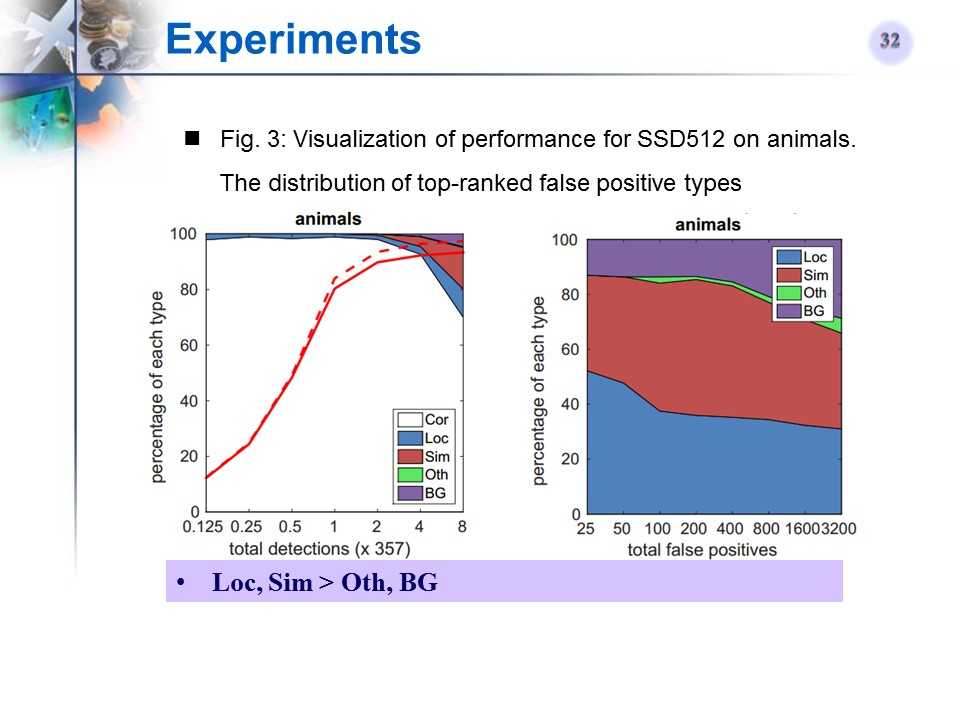
SSD512在某类Ianimals)上的检测性能可视化
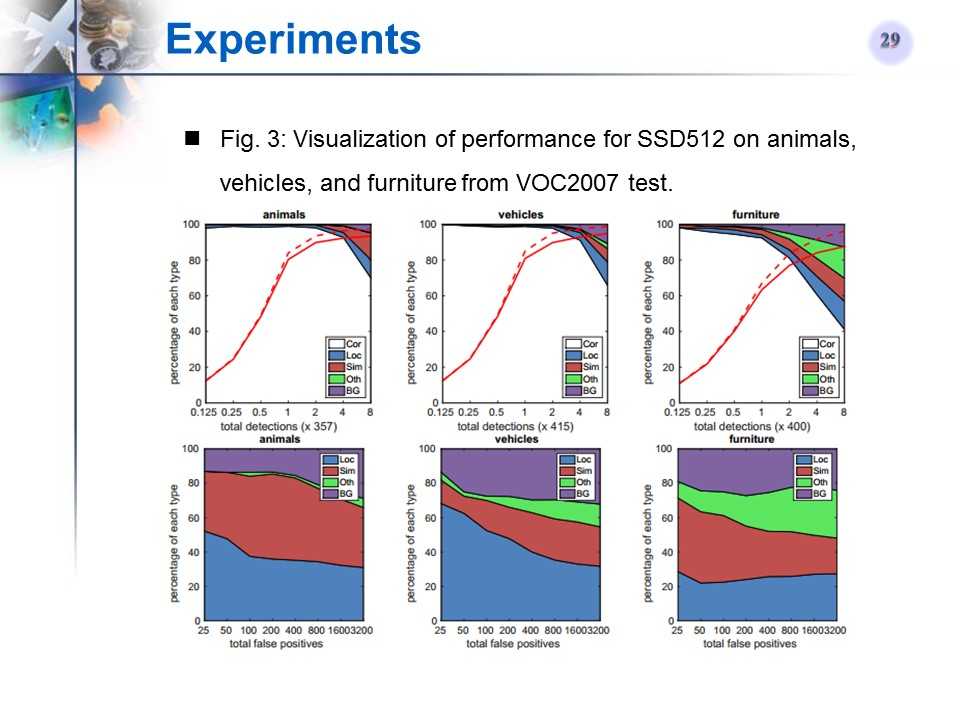
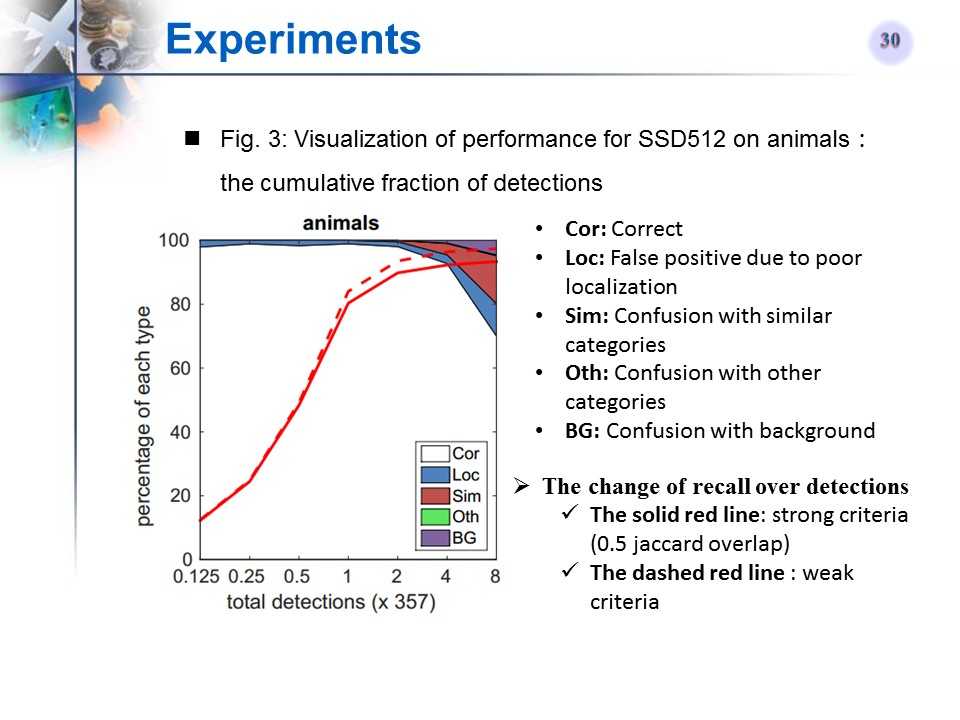
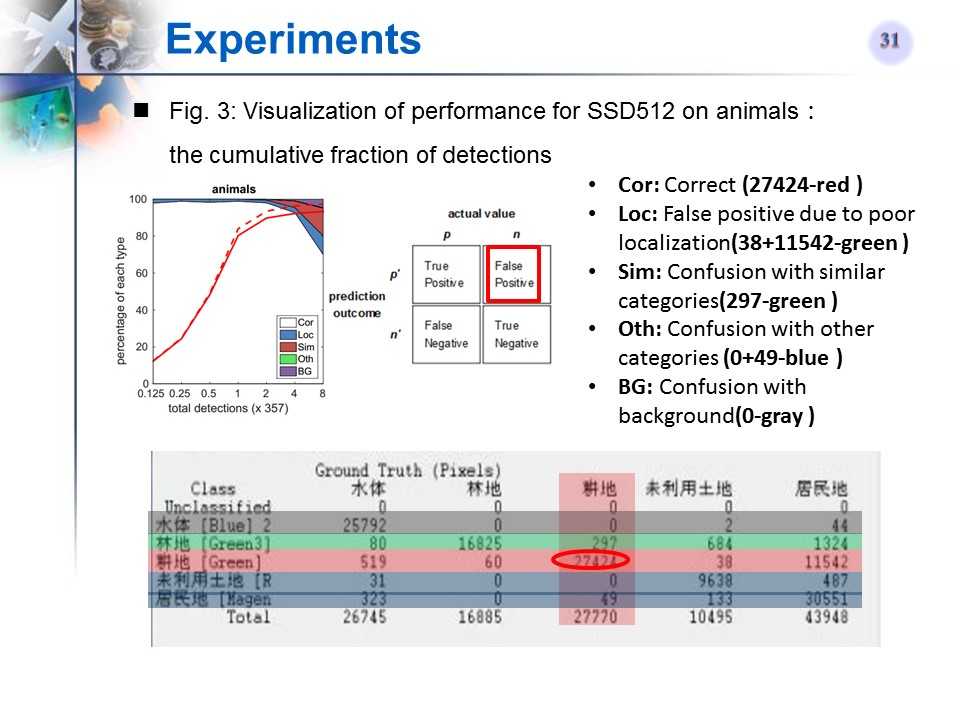
-
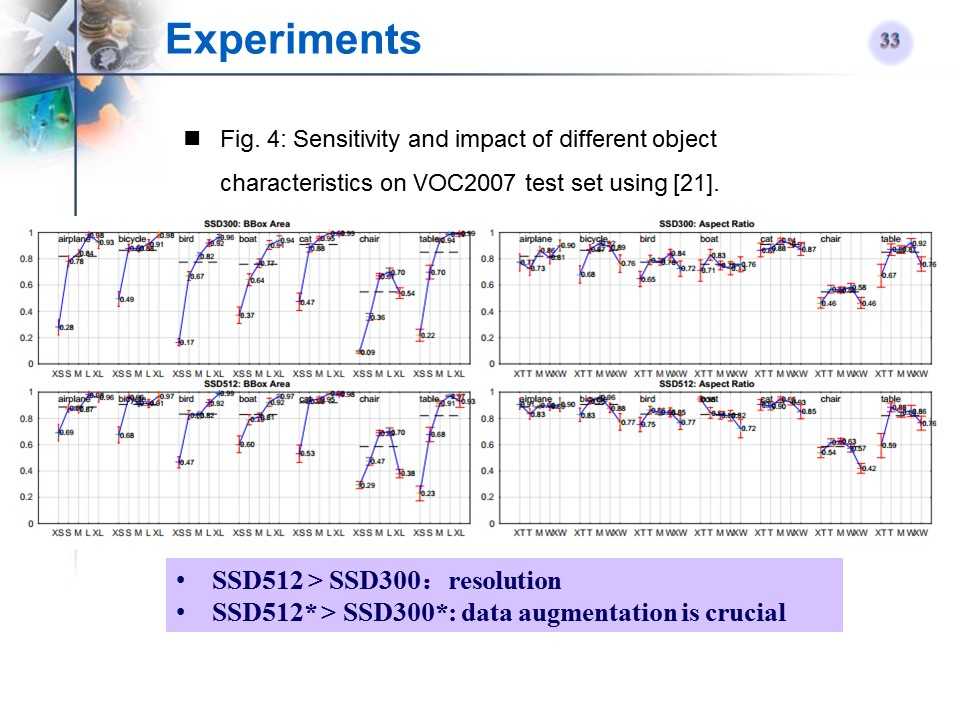
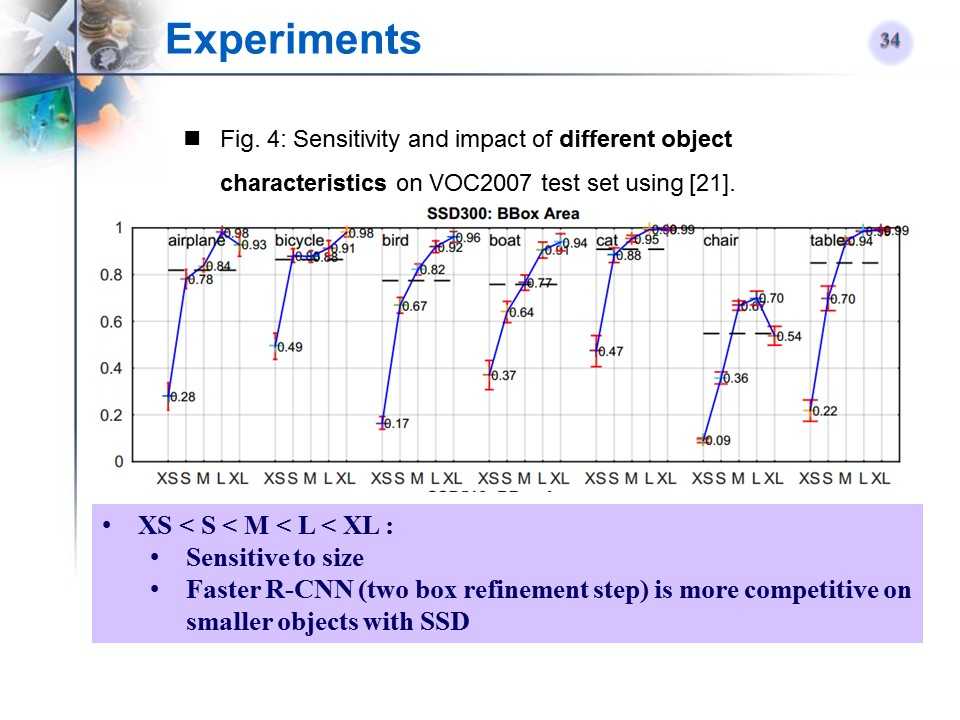
SSD对于目标大小的敏感性实验
-
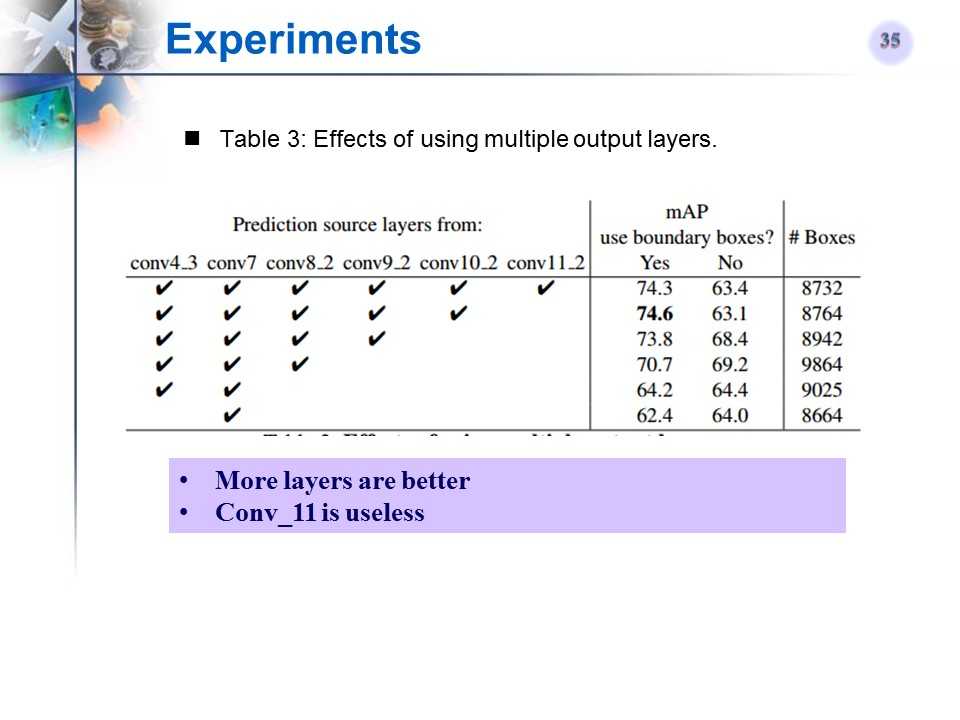
SSD使用的feature map的个数对结果的影响
-
示例结果

-
时间和速度
与相关文章的对比
-
原始R-CNN方法的变形
-
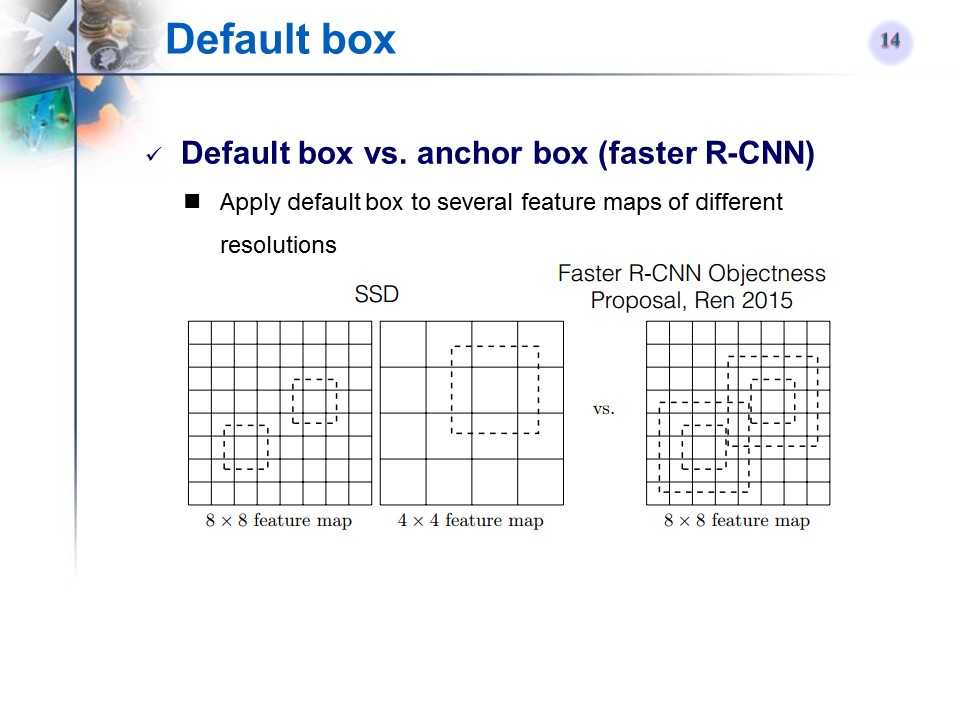
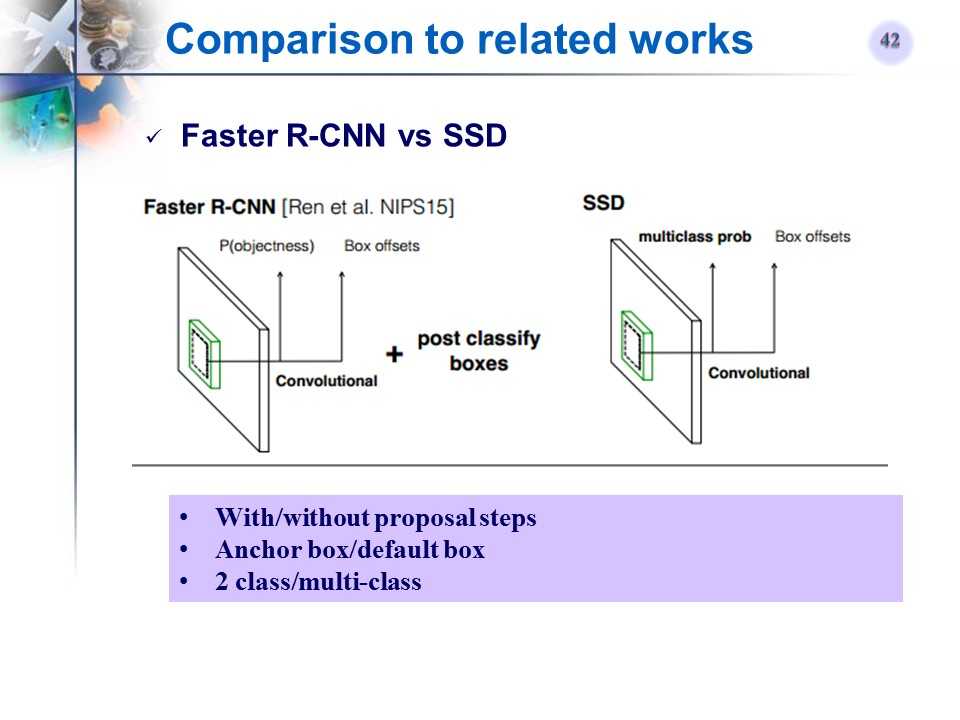
Faster R-CNN和SSD对比
-
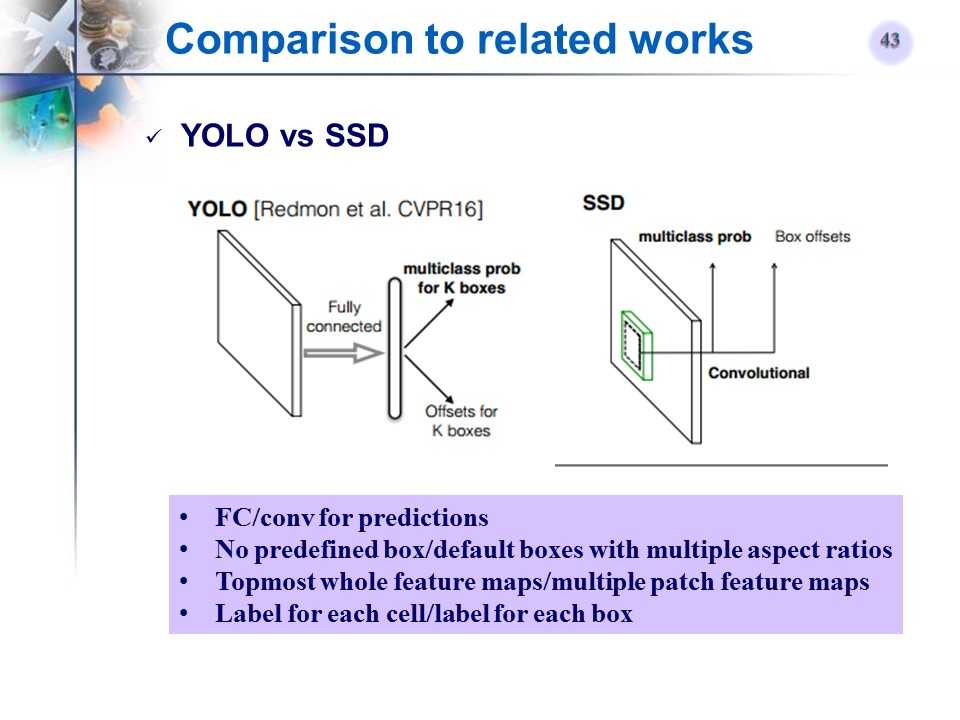
YOLO和SSD对比
总结
-
文章贡献
- SSD, a single-shot detector for multiple categories (faster than YOLO, accurate as Faster R-CNN)
- The core of SSD is predicting category scores and box offsets for a fixed set of default bounding boxes using small convolutional filters applied to multiple feature maps from different layers
- Experimental evidence: high accuracy, high speed, simple end-to-end training (single shot)
-
SSD对于其他方法的改进的关键点
-
- Using a small convolutional filter to predict object categories and offsets in bounding box locations
- Using separate predictors (filters) for different aspect ratio detections
- Using multiple layers for prediction at different scales (apply these filters to multiple feature maps to perform detection at multiple stages)
评论(1)
xiaojiuwo
2017-06-20 21:27:56
你好,谢谢你的分享,写的很好!我想请问用SSD训练好的二分类检测模型的PR曲线要怎么画呀?
共1条